无人驾驶科普入门:无人驾驶是如何驾驶的?
文章来源:未知
作者:老客SEO
人气:16
 2020-03-18 21:17:26
2020-03-18 21:17:26
有几天没有写关于汽车的文章了。今天这篇文章比较长,有3500字,阅读时间估计需要7分钟。但是我保证,一定值得每一个喜欢汽车的人阅读。
这篇文章的原作者是Sarvesh Mathi,他是一名技术专栏作者。这篇无人驾驶科普文章很棒,非技术人员也能看懂,看完后你对无人驾驶汽车的基本原理就有认知,哪怕跟人吹牛也不至于太外行。
我对文章进行了翻译和整理。希望大家喜欢。
最近武汉冠状病毒肺炎让大家见识了传染病的可怕。传染病固然可怕,不过和传染病相比,汽车交通事故的死亡人数要多的多。
根据世界卫生组织2018年的报告,每年有135万人因为交通事故死亡。这意味着每24秒就有一个人因为交通事故死亡。
而5~29岁这个青少年的年龄阶段,交通事故是首要死因。
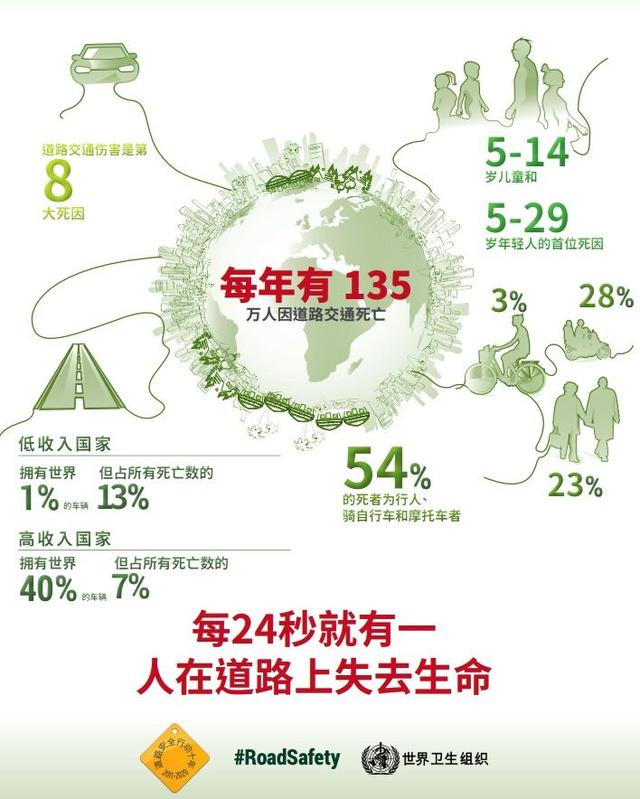
世卫组织2018年交通事故报告
在这些交通事故中,有94%都是因为驾驶员的原因造成的事故。
所以减少交通事故最好的办法是什么呢?就是不要让人来开车。因为人类开车实在太危险了。犯困、喝酒、看路边的美女...就连打个喷嚏都可能引发交通事故。
不过无人驾驶汽车现在还不完美。但是未来,无人驾驶汽车除了可以减少交通事故以外,还可以带来更高的生产率、更好的交通秩序和更低的能耗等等好处。
那么问题来了,是谁在驾驶无人汽车呢?
千万不要以为你汽车上面的自适应巡航控制系统就是自动驾驶。这只是辅助驾驶,在美国汽车工程师协会(SAE)制定的六个级别的驾驶自动化中,这种辅助驾驶只是处于第一级或第二级。
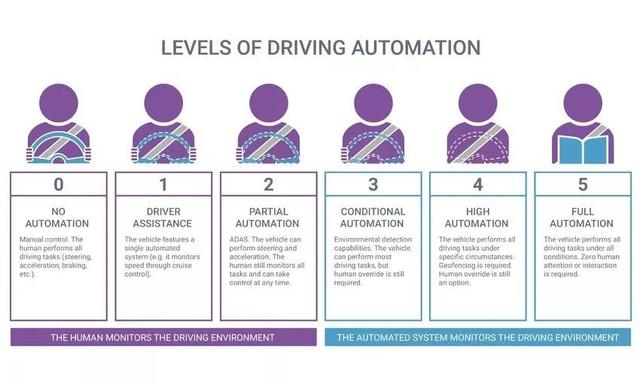
SAE自动驾驶级别
生产第4级和第5级汽车一直都是汽车公司的目标。但是到现在为止还没有一辆车真正到达第5级-完全自动驾驶。
要实现真正的无人驾驶取决于三个关键因素:传感器,软件和车联网。
传感器,传感器和更多的传感器
传感器包括激光雷达,超声波和摄像头,它们就像是汽车的眼睛。目前对于传感器数量和类型,还没形成统一标准。两个全世界领先的无人驾驶公司:Waymo(谷歌母公司Alphabet旗下的公司)和特斯拉,他们的做法就不一样。
Waymo
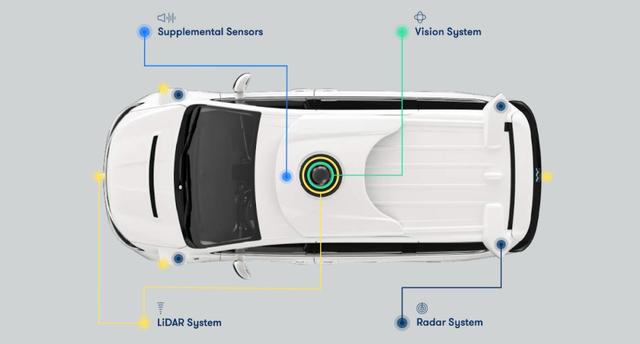
Waymo传感器
Waymo改装了克莱斯勒的一款混合动力MPV,并采用了由以下传感器组成的专有技术。

Waymo的改装车
激光雷达
激光雷达的检测和测距系统,每秒向汽车周围360°发出数10亿个激光脉冲,然后测量从周围物体表面反射后,这些光返回所需要的时间。
系统使用这些信息创建汽车周围物体和环境的详细3d地图,系统具有三个激光雷达传感器:近距离、中距离和远距离。
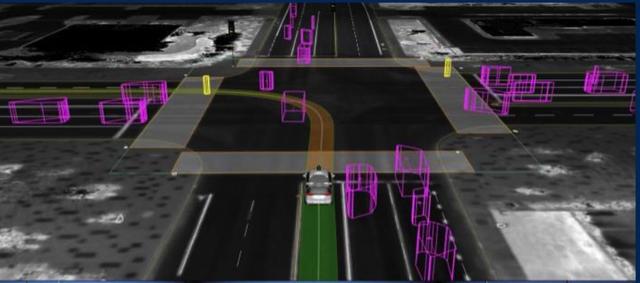
图片来自Waymo 2018介绍资料
由于这些传感器发光,因此他们可以在白天和晚上都能工作,但是在恶劣天气下他们并不可靠。
摄像头
视觉系统由几个高分辨率的摄像头组成,这些摄像头覆盖了车辆的前部,侧面和后部。与激光雷达不同,相机可以检测颜色,这对于发现交通信号灯,建筑区域标志和紧急车辆照明灯很有用。
这些摄像头在白天的日光和晚上的弱光条件下都能正常工作。但是和其他相机一样,摄像头的效果会随着光亮度降低而降低。
无线电波雷达
雷达系统和激光雷达类似,也是根据返回的波来检测周围物体。不同的是雷达发射的是无线电波。与上面两种传感器相比,雷达的优势在于它能够在多种天气条件下工作,包括雨,雪和雾。同样,它也有弱点:在识别形状和其他此类特征时,雷达传感器的细节水平较低。